Robot de déneigement et de la tonte de gazon
Développement d'une plateforme robotique innovante et flexible qui peut se conduire durant les hivers québécois et s'adapter aux étés ensoleillés.
Le projet
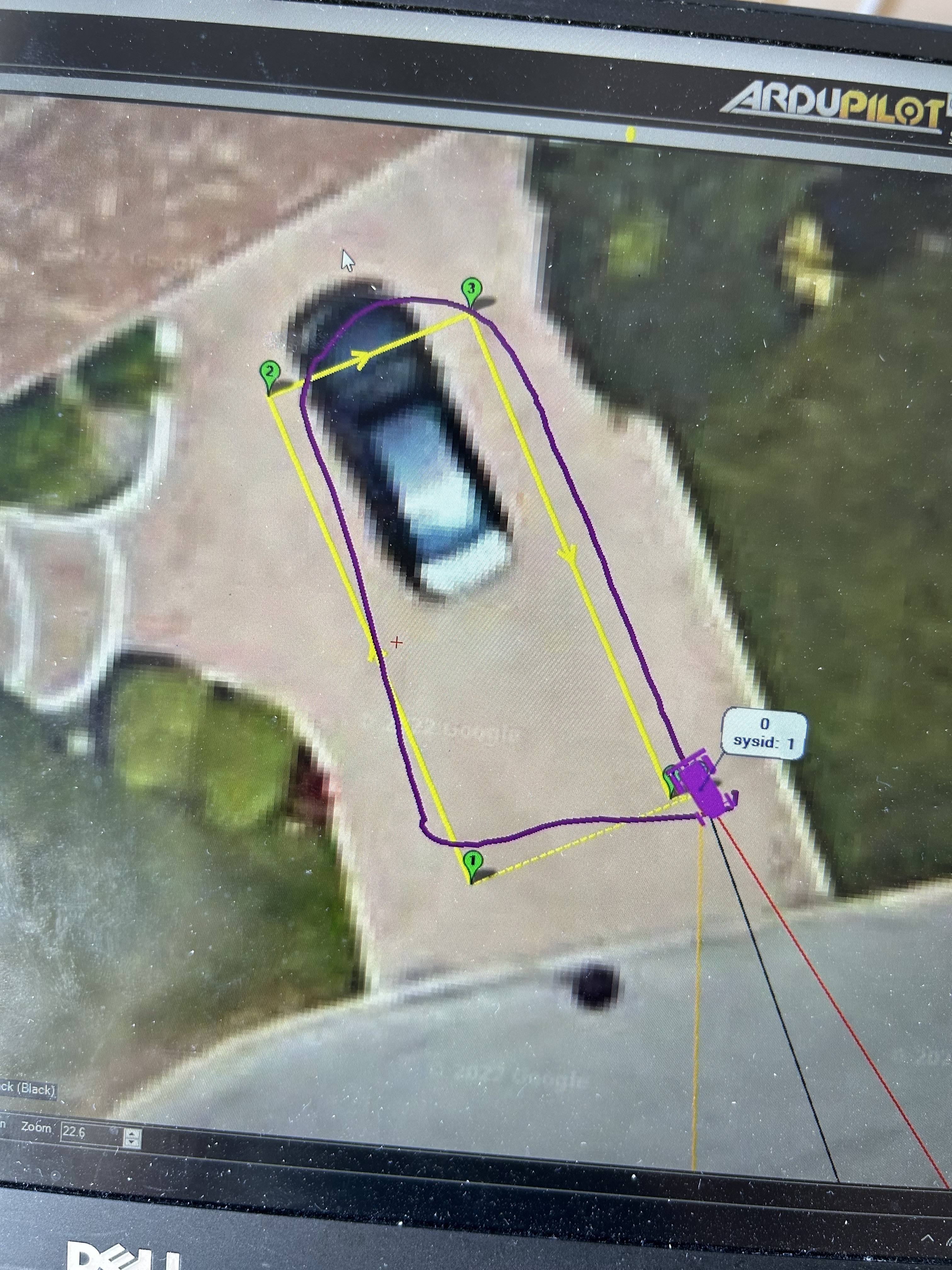
Le but principal : développer une plateforme automatique durable et adaptable pour effectuer les tâches jardinières au Québec. Le châssis importé a été complémenté avec un système de positionnement cinématique en temps réel au GPS pour obtenir une précision de mouvement au centimètre près. Avec le système de contrôle Pixhawk qui y est installé, la navigation manuelle et par un chemin préprogrammé est possible.
La tarière et le devant de la souffleuse à neige sont démontables pour l’été. Ainsi, pour la puissance, le robot hybride est alimenté par un moteur à essence, et ce, pour permettre un système de mouvement électrique, donc précis.
Démonstration vidéo
- À 0min 0s : Déneigement
- À 1min 3s : Tonte de gazon

Photo